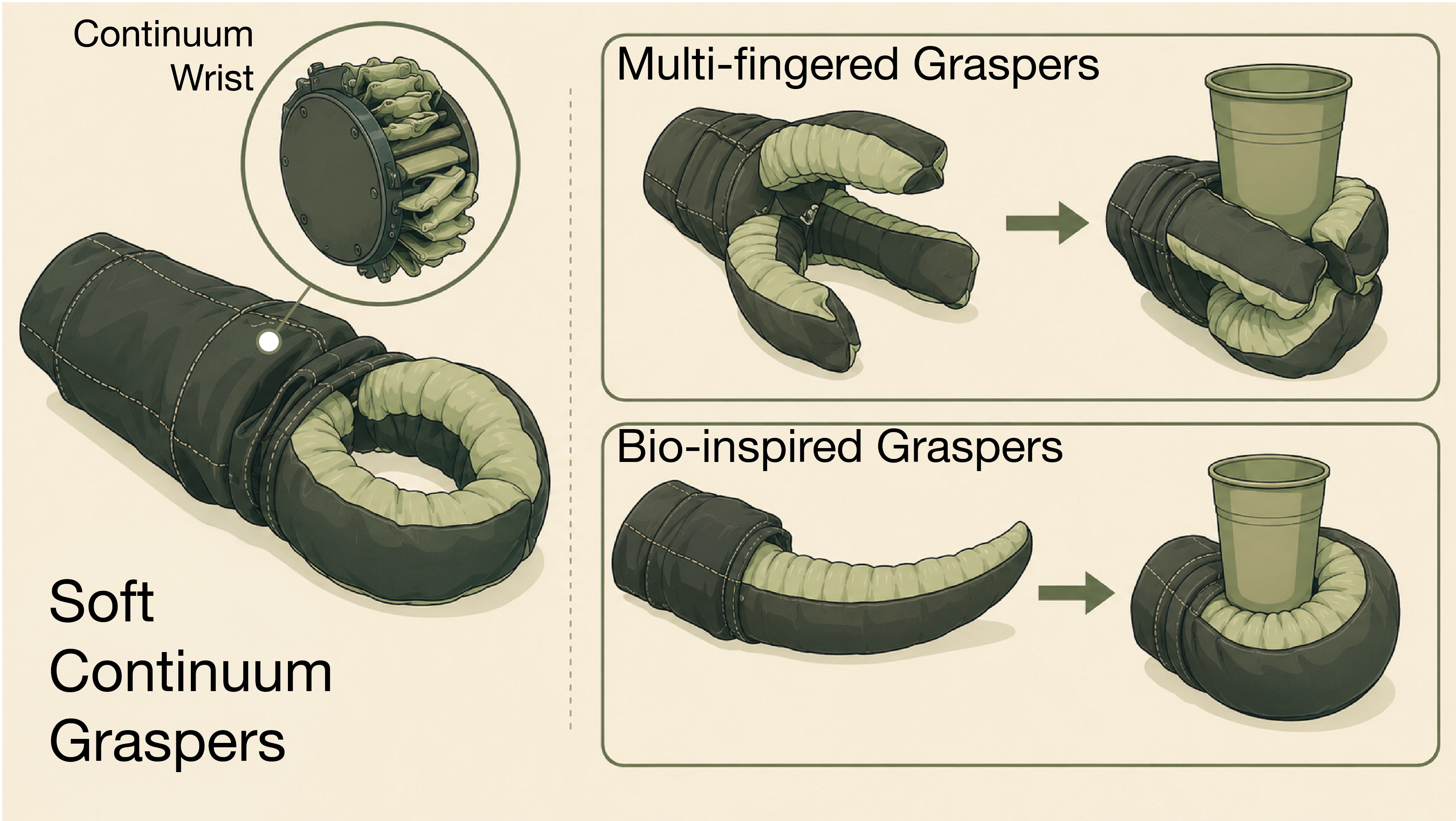
Soft graspers are compliant manipulation primitives that wrap around objects with distributed contact, reducing the risk of damage to fragile items and the people interacting with them. The work combines fabric-based actuation with selective bending control to enable gentle, conformable grasping.
All themes / Supernumerary Limbs and Continuum Manipulation
Soft Graspers
2019 · IEEE RoboSoft
P. H. Nguyen, S. Sridar, S. Amatya, C. Thalman, P. Polygerinos
Videos
Related publications
- 2019
P. H. Nguyen, F. L. Arellano, W. Zhang, P. Polygerinos · IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
- 2019
P. H. Nguyen, S. Sridar, S. Amatya, C. Thalman, P. Polygerinos · IEEE International Conference on Soft Robotics (RoboSoft)