An untethered soft continuum robotic module that integrates fabric-based sensing directly into its body, paving the way for self-contained soft manipulators that do not depend on external tethers for power or data.
All themes / Supernumerary Limbs and Continuum Manipulation
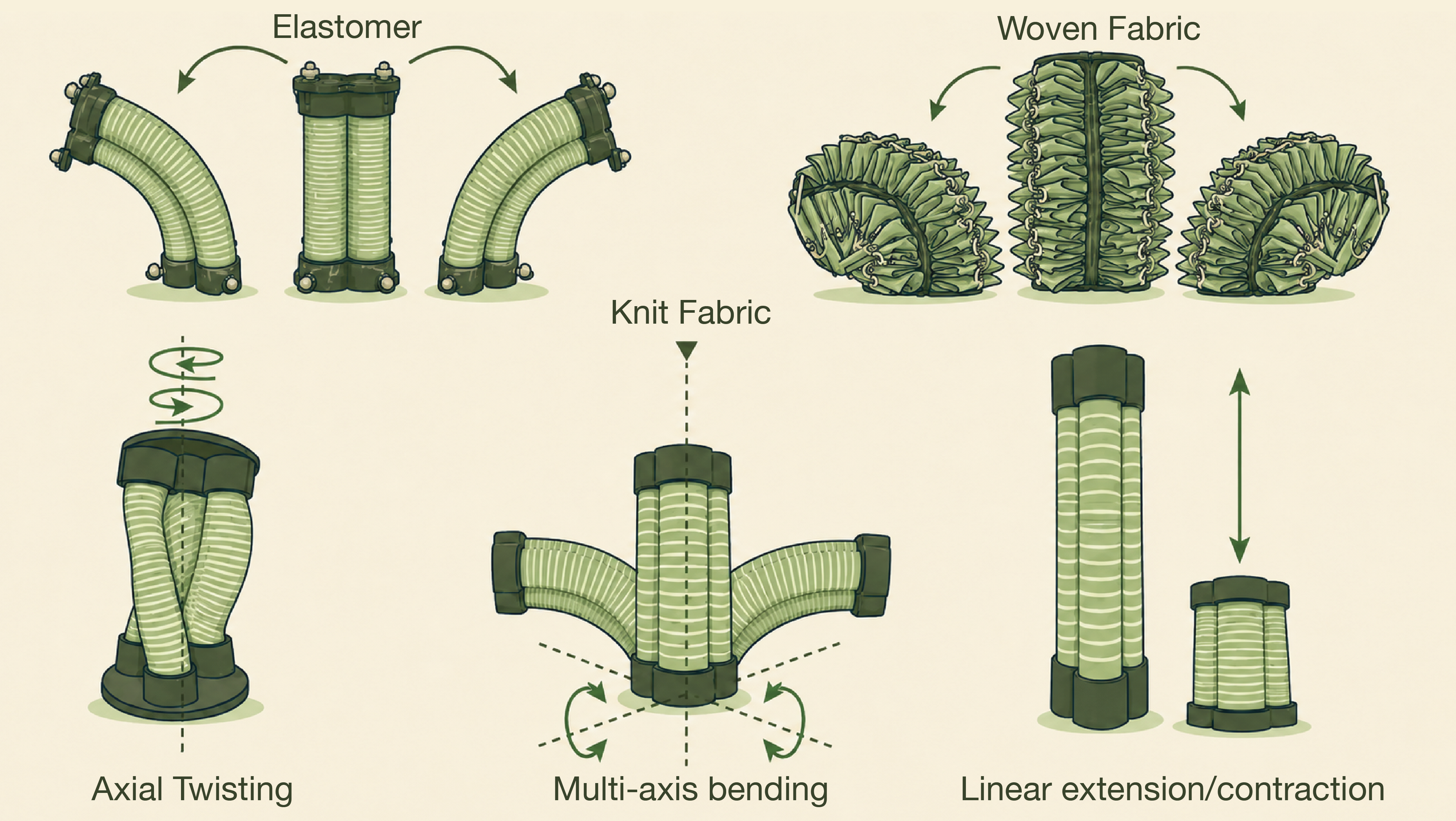
Sensorized Soft Continuum Module
2020 · IEEE RoboSoft
P. H. Nguyen, Z. Qiao, S. Seidel, S. Amatya, I. I. B. Mohd, W. Zhang
Videos
Related publications
- 2022
Model-based contact detection and position control of a fabric soft robot in unknown environments
Z. Qiao, P. H. Nguyen, W. Zhang · Frontiers in Robotics and AI — Advances in Modelling and Control of Soft Robots Vol. II
- 2021
P. H. Nguyen, I. I. B. Mohd, K. Duford, X. Bao, W. Zhang · IEEE International Conference on Soft Robotics (RoboSoft)
- 2020
Towards an Untethered Knit Fabric Soft Continuum Robotic Module with Embedded Fabric Sensing
P. H. Nguyen, Z. Qiao, S. Seidel, S. Amatya, I. I. B. Mohd, W. Zhang · IEEE International Conference on Soft Robotics (RoboSoft)
- 2019
Dynamic Modeling and Motion Control of a Soft Robotic Arm Segment
Z. Qiao, P. H. Nguyen, P. Polygerinos, W. Zhang · American Control Conference (ACC)
- 2017
P. H. Nguyen†, S. Sridar†, W. Zhang, P. Polygerinos · International Journal of Intelligent Robot Application (IJIRA)
Related patents
- US 12,186,903
Methods for use of soft continuum robotic module
W. Zhang, P. H. Nguyen, Z. Qiao, S. Seidel, I. I. B. Mohd, S. Amatya
Funded by
-

EAGER: Distributed Iterative Control of Soft Robotic Arms
U.S. National Science Foundation (NSF) · EAGER (Early-Concept Grants for Exploratory Research) — CMMI-1800940 · 2018 – 2021