Fabric-based soft pneumatic actuators designed for wearable assistive devices, with a computational modeling framework that runs roughly 10x faster than conventional silicone-based soft actuator simulations. The work has been one of the most cited contributions in fabric soft robotics and has been adopted by groups at the Toyota Research Institute and MIT.
All themes / Assistive and Rehabilitative Robotics
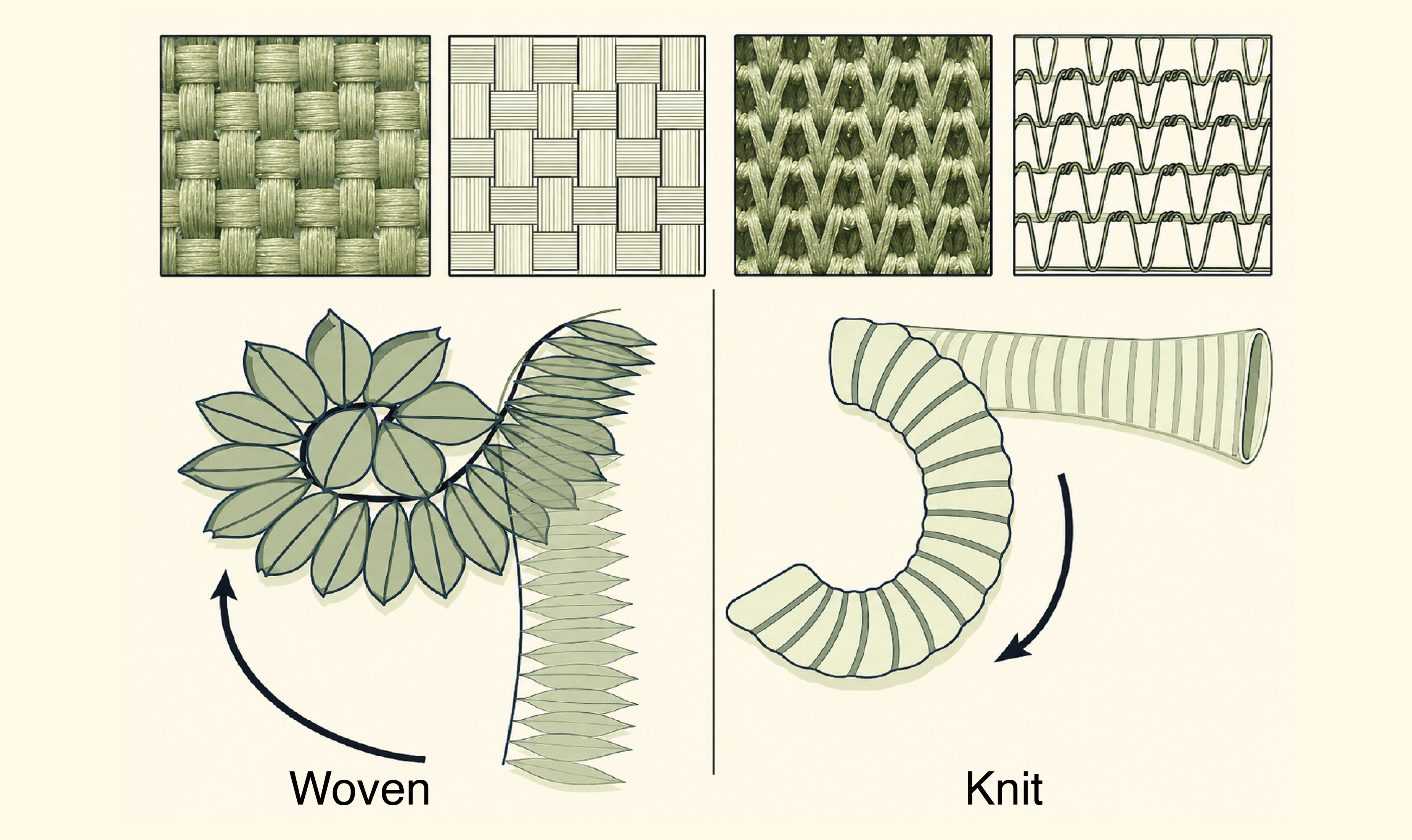
Fabric Soft Pneumatic Actuators
2020 · Scientific Reports
P. H. Nguyen, W. Zhang
Videos
Related publications
- 2020
Design and Computational Modeling of Fabric Soft Pneumatic Actuators for Wearable Assistive Devices
P. H. Nguyen, W. Zhang · Scientific Reports — Soft Sensors and Actuators and Wearable Technology Collection
Related patents
- US 11,584,021
Fabric-reinforced textile actuators
P. H. Nguyen, W. Zhang, P. Polygerinos, F. L. Arellano