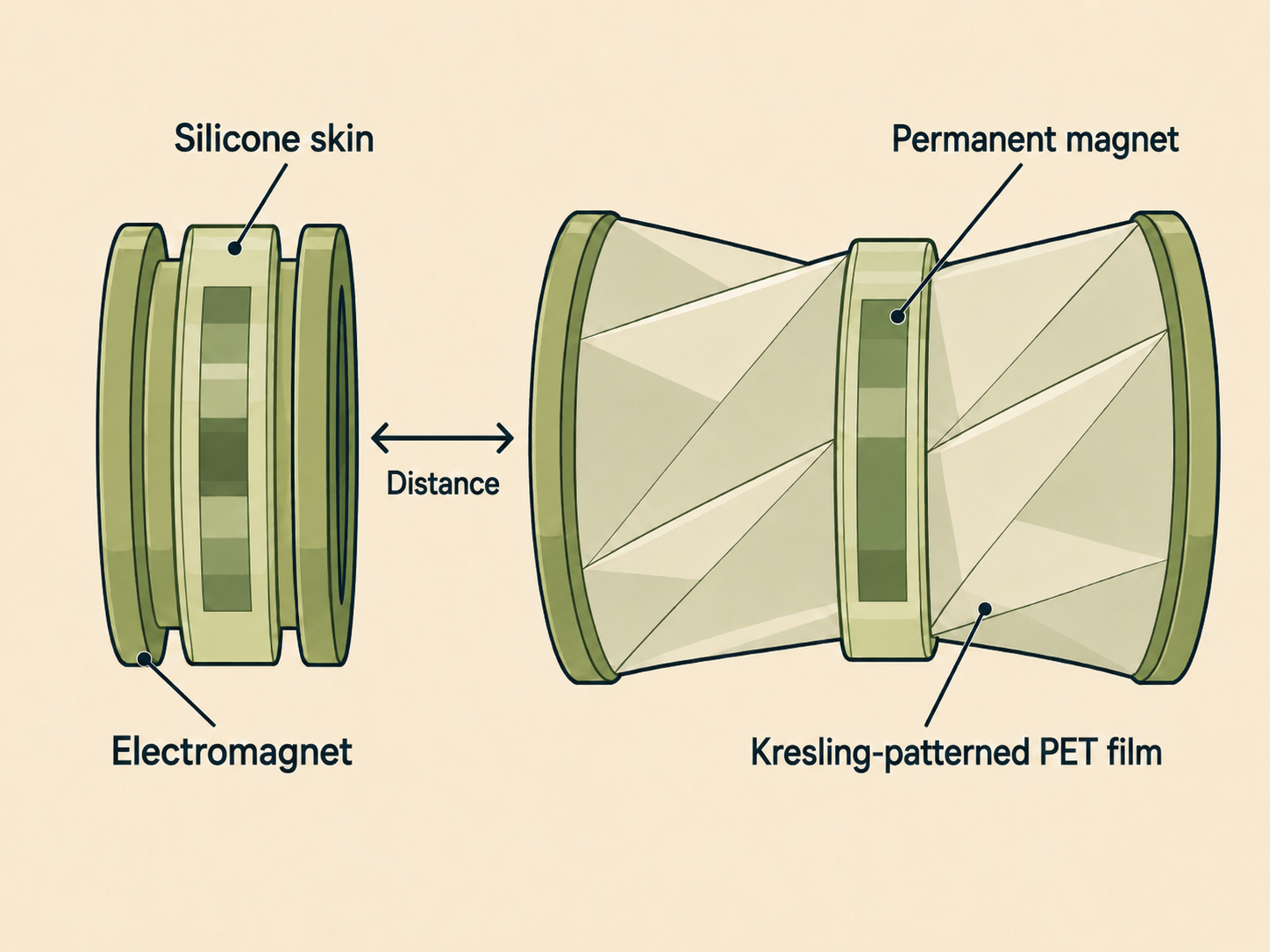
Soft electromagnetic actuators housed in Kresling-origami structures for modular soft robotic platforms. The folding geometry provides nonlinear stiffness profiles and amplifies actuator displacement, while the modular design enables stacking and assembly into larger morphologies.
This work contributes to a growing ecosystem of soft actuator primitives that can be remixed across application domains.