Other Soft Robotics
Foundational soft robotics components — actuators, grippers, and manipulation primitives — designed for cross-cutting use across multiple applications. These projects develop the underlying technology that supports aerial, wearable, and supernumerary systems alike.
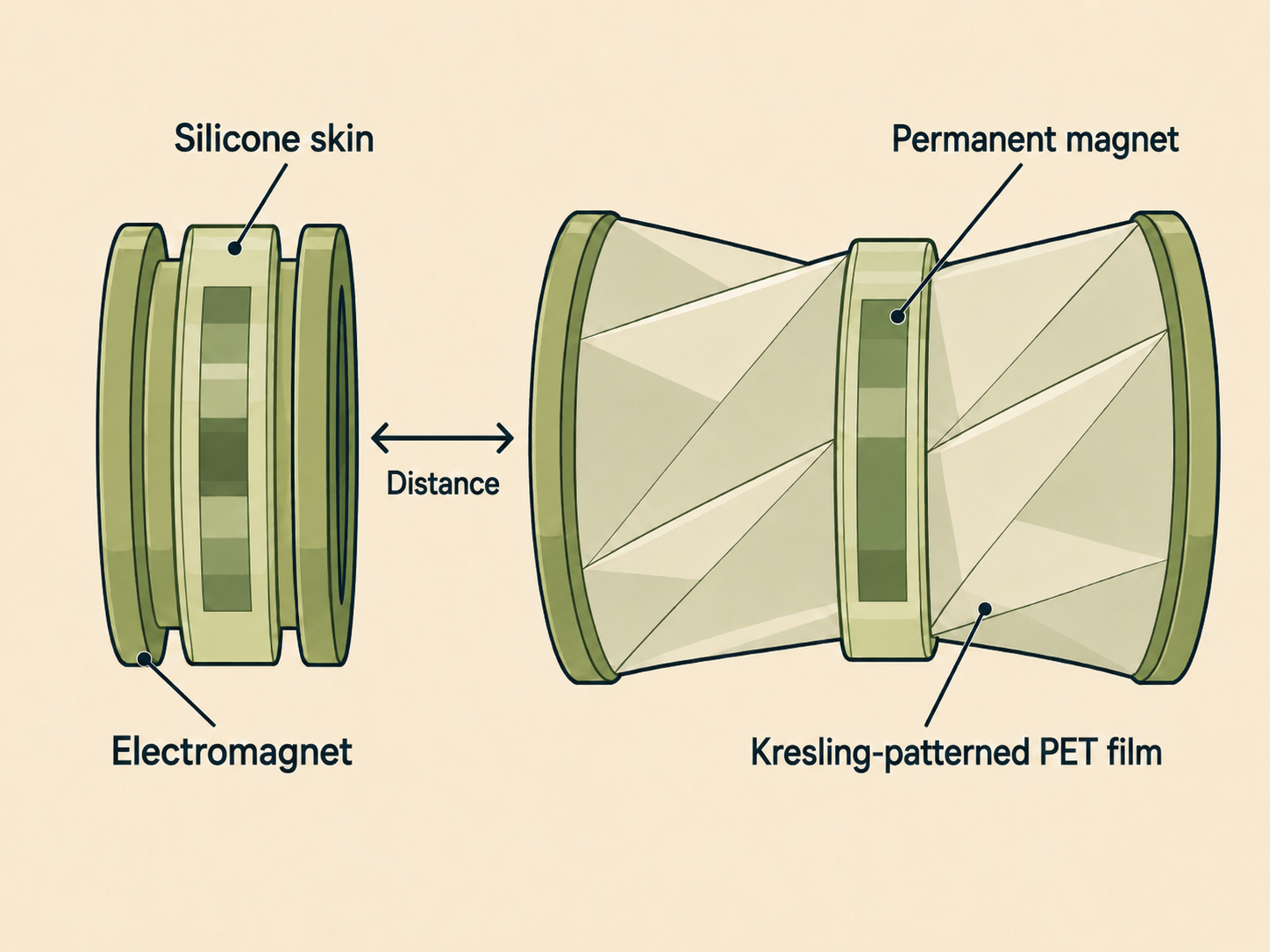
Flexible Electromagnetic Actuators with Kresling-Origami Housing
Modular soft electromagnetic actuators based on Kresling-origami geometry, designed for assembly into larger soft robotic morphologies.
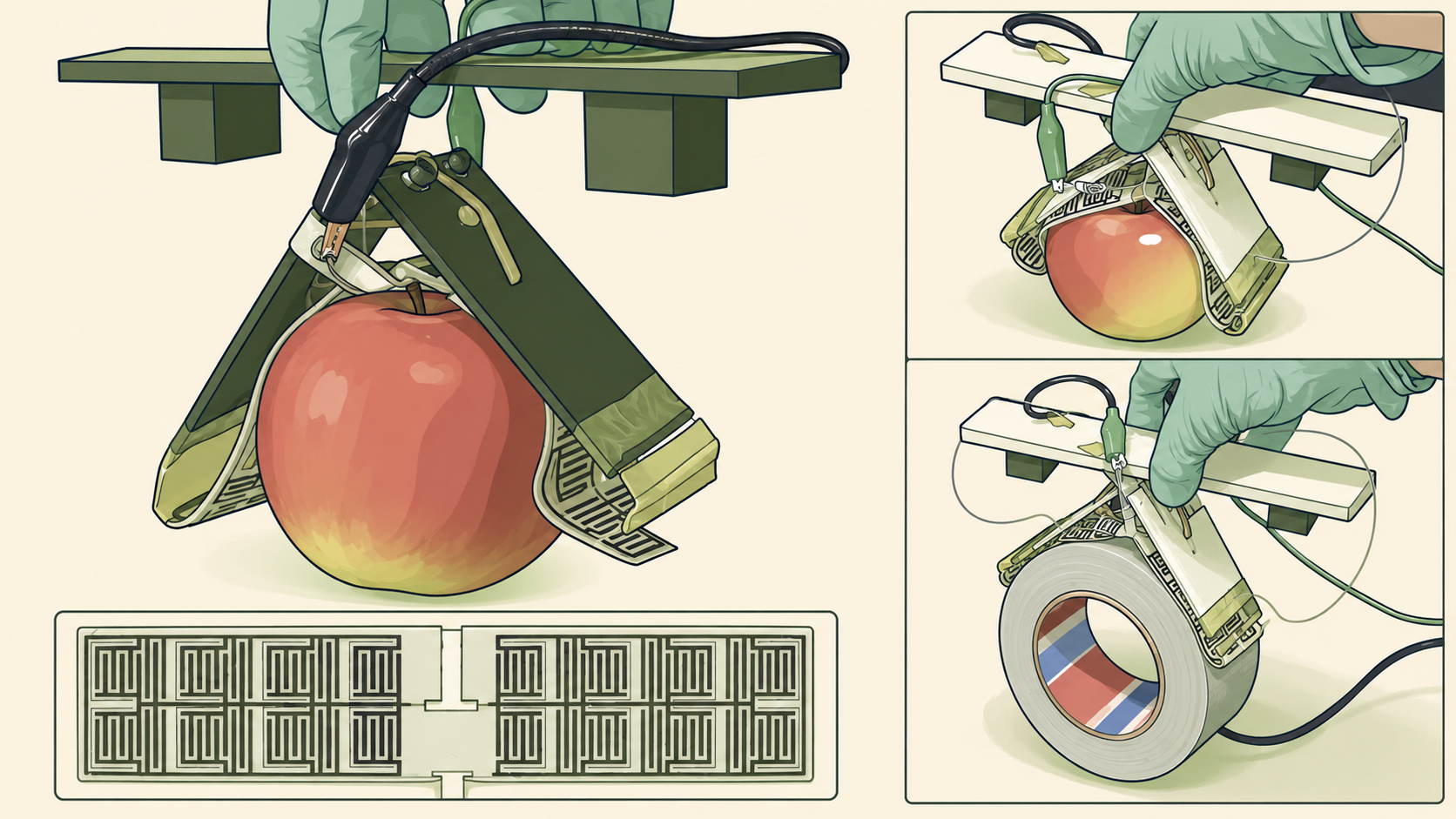
Hybrid Soft Electrostatic Metamaterial Gripper
A soft gripper that combines electrostatic adhesion with metamaterial compliance to adapt across many surface materials and object shapes. Best Paper Finalist at RoboSoft 2024.