Aerial-Aquatic Robotics
Robots designed to operate across air and water using bio-inspired adhesion and locomotion. Targets include remora-style hitchhiking onto moving hosts, midge-inspired adhesion on wet surfaces, and seamless aerial-aquatic transitions.
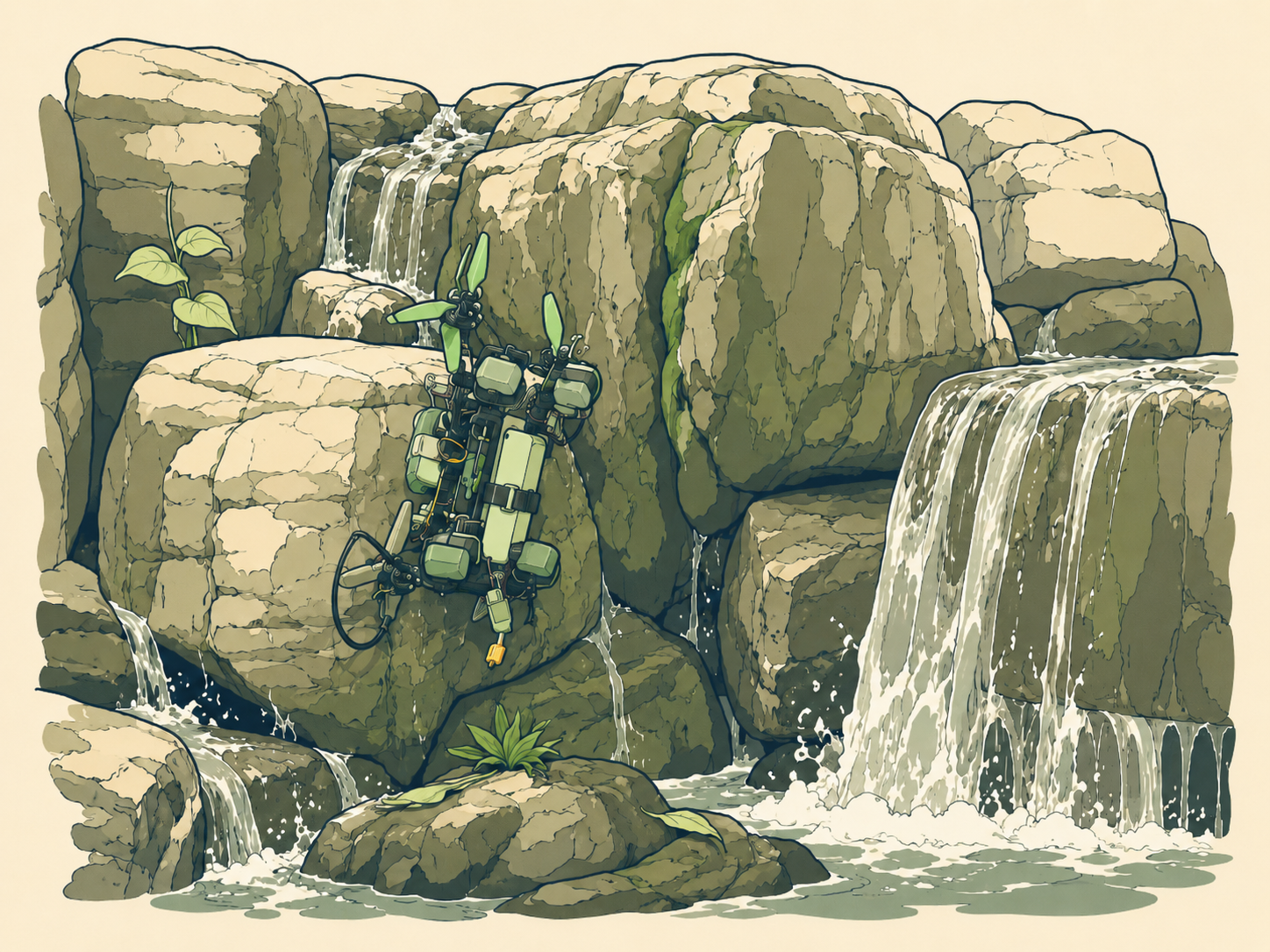
Aerial-Aquatic Hitchhiking Robots
Bio-inspired robots that transition between air and water with high performance, using redundant adhesion modeled after remora hitchhiker fish.
Net-winged Midge Larva Adhesive Disc
A biomimetic soft adhesive inspired by net-winged midge larvae, enabling robust adhesion and controlled sliding on wet surfaces.

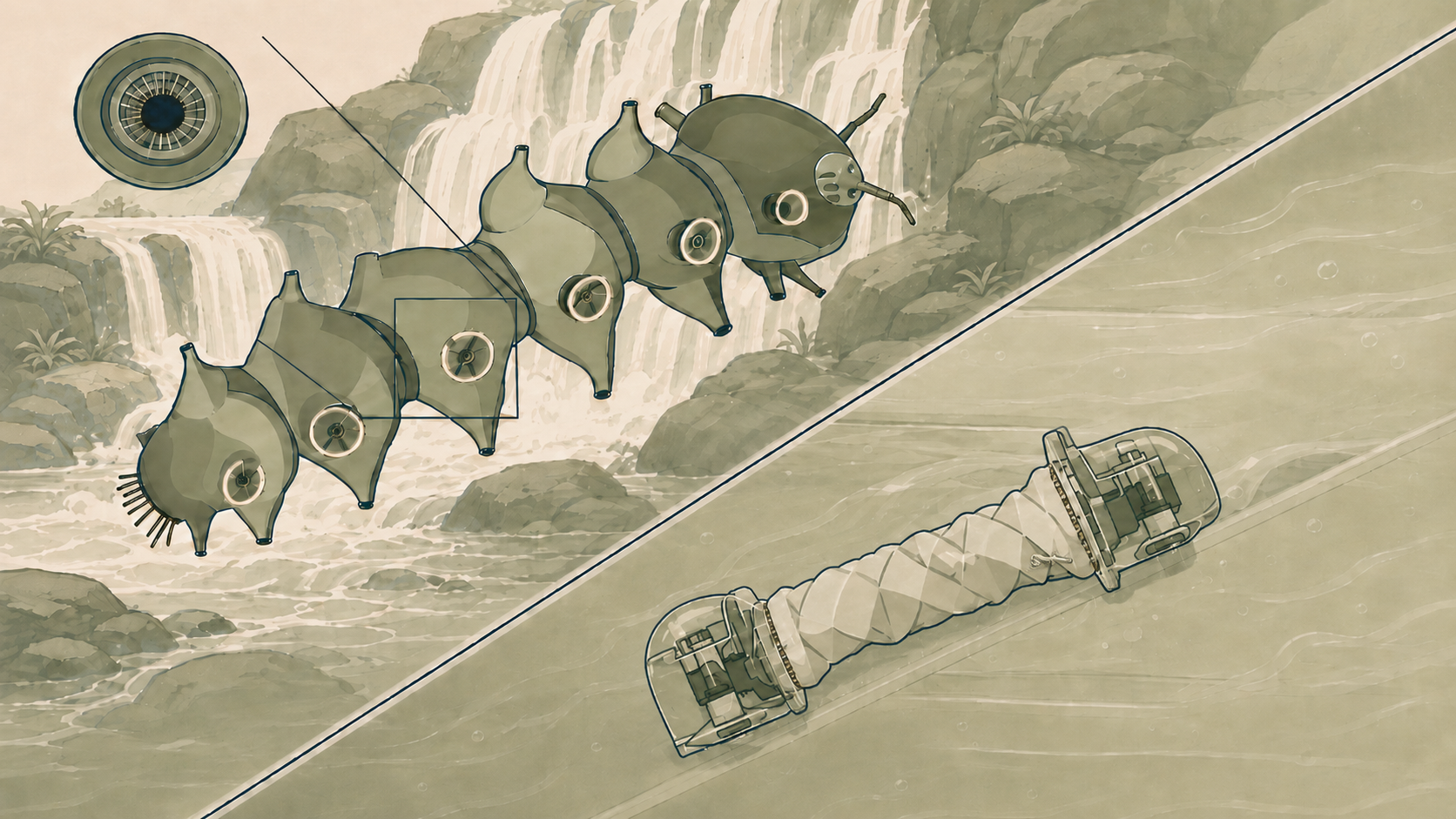
Tumblerbot — Tumbling Robot Sensors for Benthic Habitats
Tumbling robotic sensors for minimally invasive monitoring of seafloor environments, designed to drift with currents and reduce disturbance to delicate benthic habitats.
SIMBI — Soft Intelligent Module for Benthic Interactions
A soft underwater module that interfaces gently with seafloor organisms and substrates, enabling new in situ biodiversity studies in fragile marine environments.
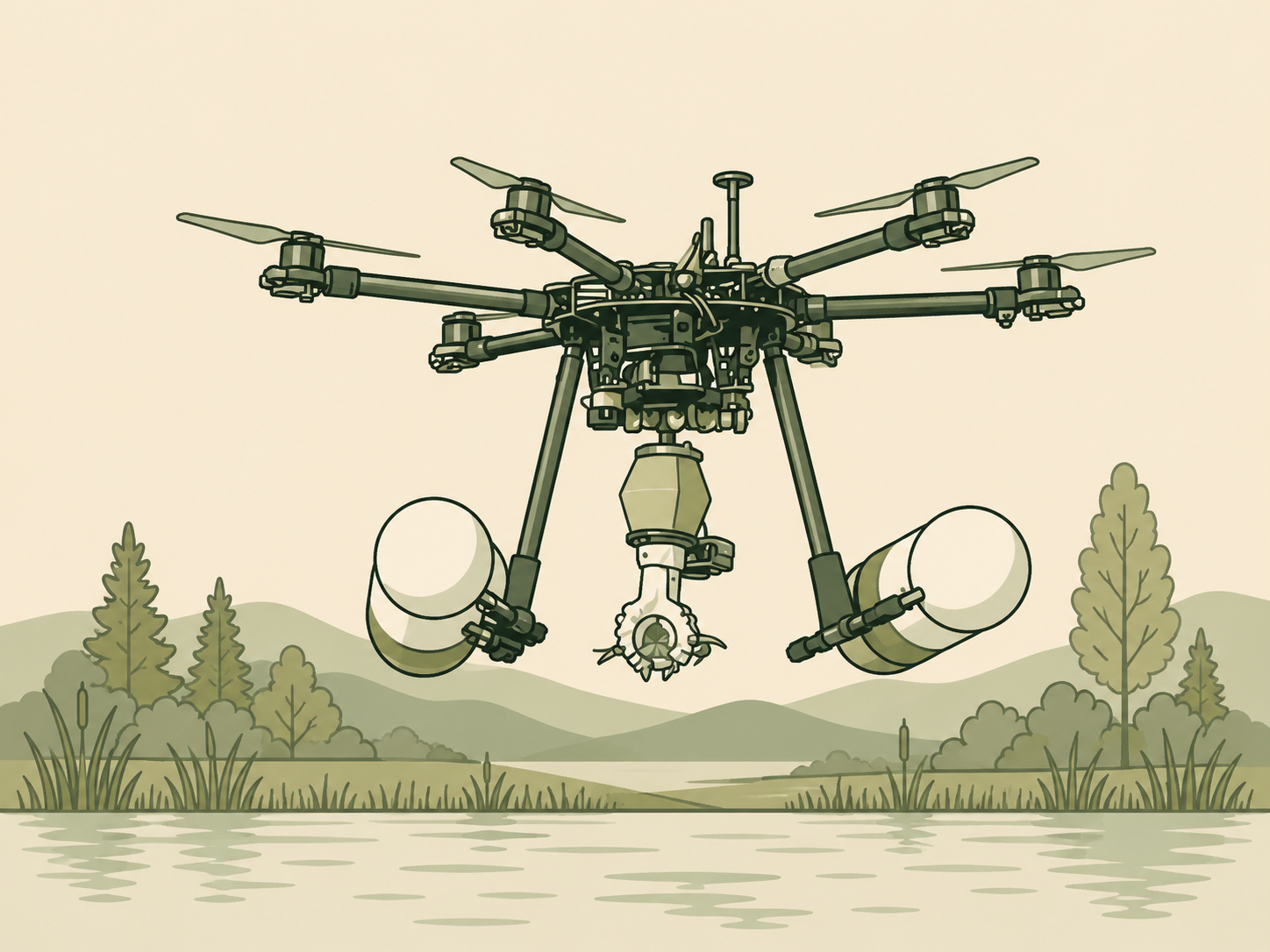
Flapping Hydrofoil Propulsion for Uncrewed Surface Vehicles
A flapping hydrofoil propulsion mechanism for uncrewed surface vehicles, providing efficient thrust and quiet operation across varying flow conditions.

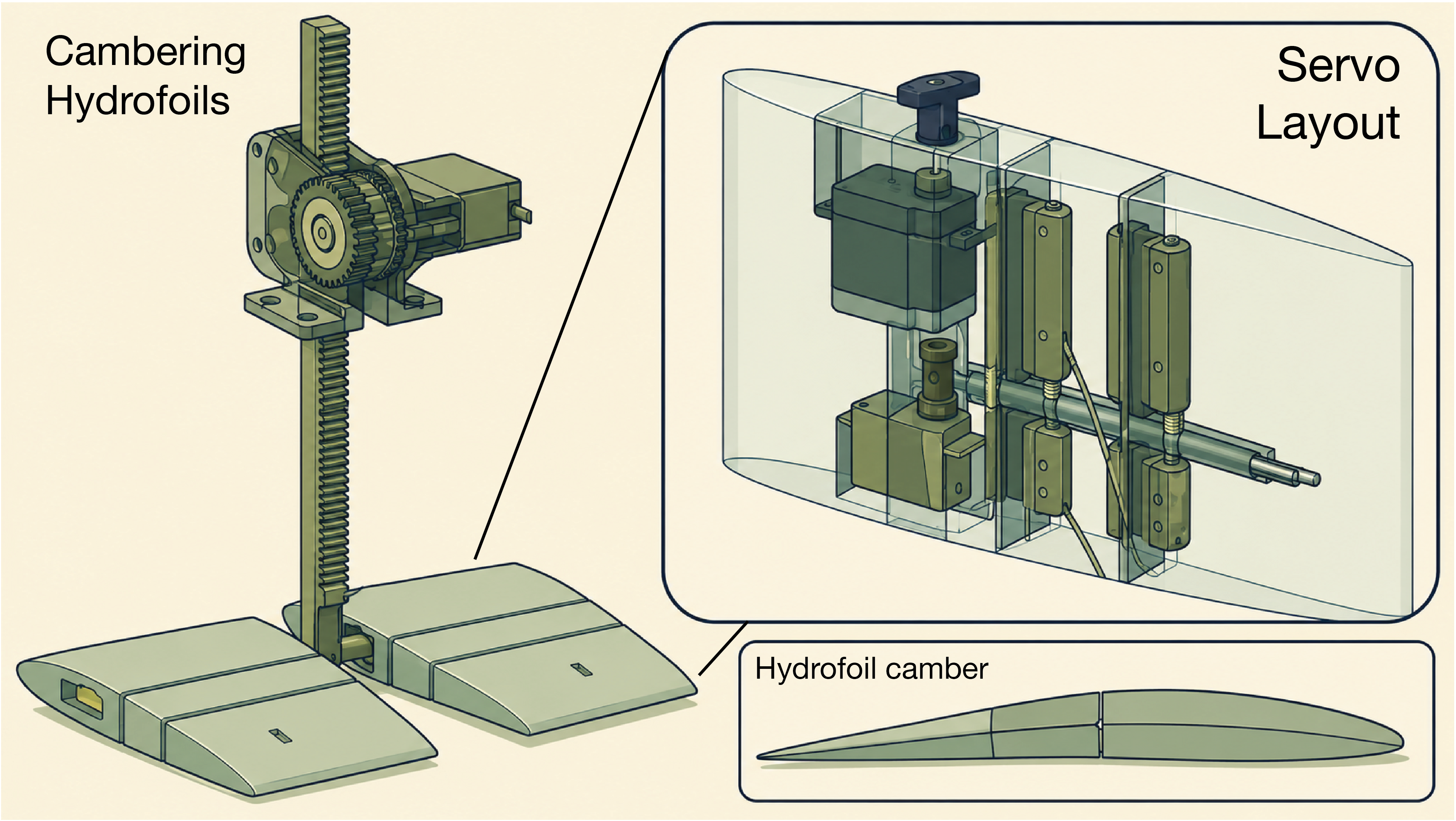
Soft Robotic Morphing Wing for Unmanned Underwater Vehicles
A soft morphing wing for unmanned underwater vehicles that enables adaptive maneuvering across varying flow conditions. Featured on the front cover of Advanced Intelligent Systems.